
Mecanismos das asas dos escaravelhos inspiram a conceção de robôs
Uma análise da forma como os escaravelhos-rinocerontes abrem e retraem as suas asas posteriores mostra que o processo é passivo, não exigindo qualquer atividade muscular. As descobertas, publicadas esta semana na revista Nature, poderão ajudar a melhorar a conceção de micro-máquinas voadoras.
Entre todos os insetos voadores, os escaravelhos são os que apresentam os mecanismos de asa mais complexos, envolvendo dois conjuntos de asas: um par de asas anteriores endurecidas chamadas élitros e um conjunto de delicadas asas posteriores membranosas.
Embora exista uma extensa investigação sobre as dobras em forma de origami das suas asas, pouco se sabe sobre a forma como abrem e retraem as asas posteriores.
Investigações anteriores teorizam que os músculos torácicos impulsionam o movimento da base das asas posteriores de um escaravelho, mas faltam provas experimentais para apoiar esta teoria.
Hoang-Vu Phan e os seus colegas combinam a utilização de câmaras de alta velocidade e de um robô voador dinamicamente semelhante para colmatar esta lacuna de investigação.
Os autores observam que os escaravelhos-rinocerontes utilizam mecanismos passivos, incluindo os seus élitros, para abrir e recolher as suas asas.
A abertura é um processo em duas fases, em que a elevação dos élitros liberta parcialmente as asas posteriores de forma semelhante a uma mola e, em seguida, um movimento de batimento leva as asas posteriores para uma posição de voo elevada.
Verificam também que os escaravelhos utilizam os élitros para baixar passivamente as asas posteriores para uma posição de repouso.
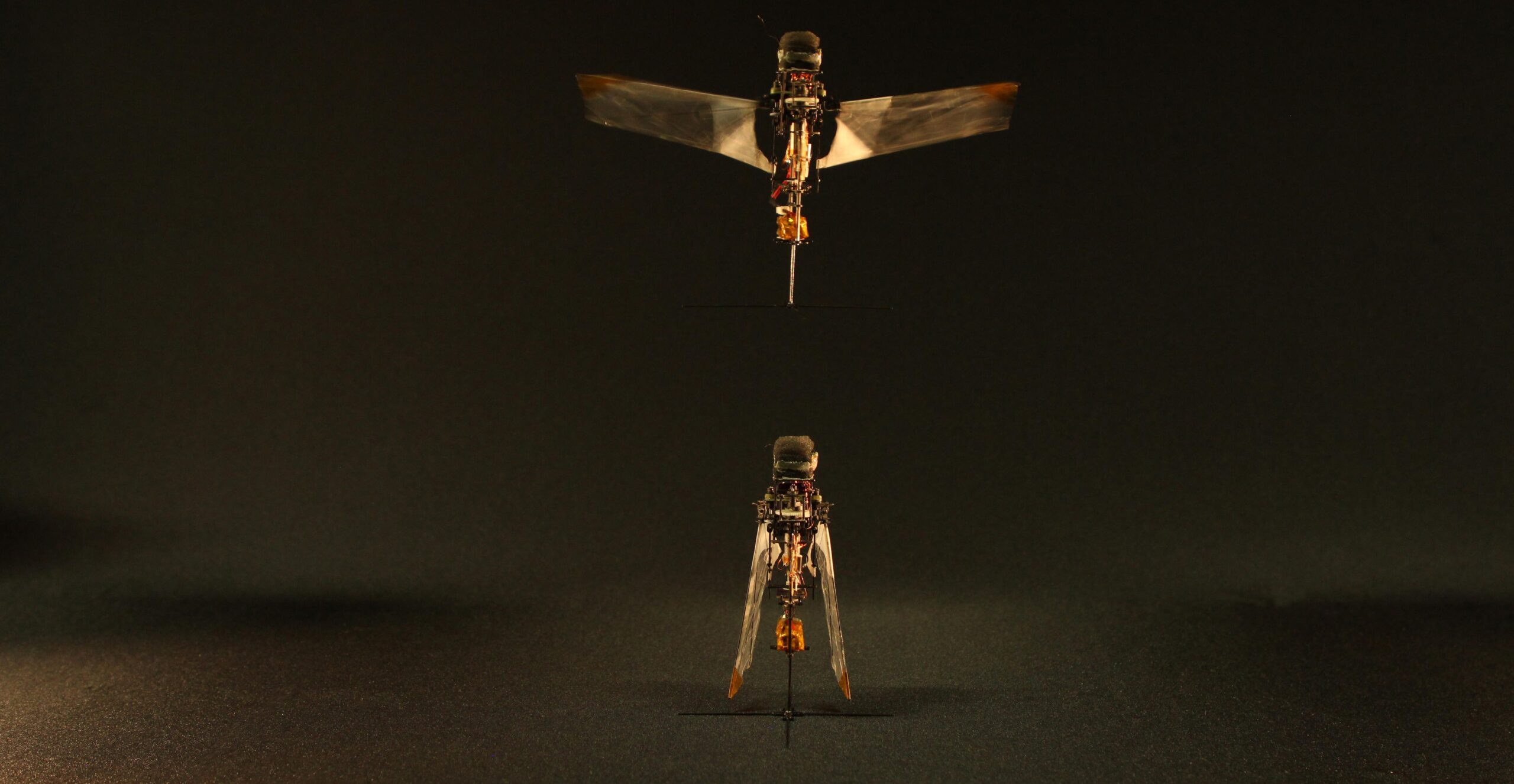
Inspirados pelas suas observações, os autores criam micro-robôs que imitam a abertura e retração passivas das asas dos escaravelhos. Os autores constatam que os robots conseguem descolar e manter o voo.
As suas descobertas sugerem que a transferência dos processos passivos das asas traseiras do escaravelho para a conceção de um robô que bate as asas pode ajudar a melhorar as capacidades de pequenos robôs que precisam de operar em espaços limitados ou desordenados.