Robô submersível navega nas correntes de água
Um veículo subaquático autónomo pode impulsionar-se eficazmente utilizando a energia das correntes de água próximas. Os veículos subaquáticos e aéreos têm de atravessar um ambiente complexo de rajadas e correntes, lutando contra muitos fluxos enquanto tentam manter o rumo.
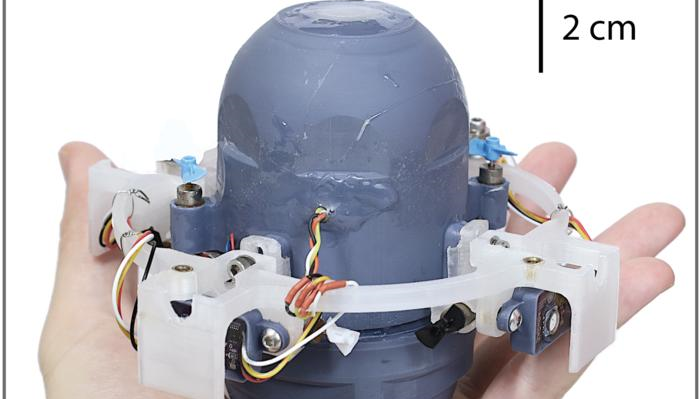
Peter Gunnarson e John O. Dabiri conceberam um robô subaquático que utiliza estes fluxos para reduzir a energia necessária para viajar, “surfando” vórtices para chegar ao seu destino. O robô do tamanho da palma da mão, CARL, estava equipado com uma unidade de medição inercial a bordo, dez motores para permitir o movimento nos três eixos e um algoritmo simples mas eficaz: se a magnitude da aceleração na direção do fluxo cruzado excedesse um limiar, CARL nadaria na mesma direção da aceleração.
O robô foi testado num tanque de 1,5 m de profundidade e 5 m de comprimento, no qual foram gerados anéis de vórtice através da pulsação de um propulsor montado na parede. Utilizando o algoritmo, o CARL foi capaz de surfar o vórtice de uma ponta à outra do tanque utilizando um quinto da energia de um robô sem a mesma programação.
De acordo com os autores, o sucesso do CARL ao surfar uma estrutura de fluxo prototípica sugere que, com uma maior elaboração, uma técnica semelhante poderia ser utilizada para permitir que os veículos autónomos melhorassem significativamente a sua eficiência através da interação com fluxos de fundo.
Veja aqui o vídeo