Engenheiros desenvolvem robô nadador em miniatura inspirado nos vermes marinhos
Os robôs nadadores desempenham um papel crucial no mapeamento da poluição, no estudo dos ecossistemas aquáticos e na monitorização da qualidade da água em zonas sensíveis, como os recifes de coral ou as margens dos lagos. No entanto, muitos dispositivos dependem de hélices ruidosas, que podem perturbar ou prejudicar a vida selvagem. A desordem natural nestes ambientes – incluindo plantas, animais e detritos – também representa um desafio para os nadadores robóticos.
Agora, investigadores do Laboratório de Transdutores Suaves e do Laboratório de Diagnóstico de Fluxo Instável da Escola de Engenharia da EPFL e do Instituto Max Planck de Sistemas Inteligentes desenvolveram um robô compacto e versátil que pode manobrar em espaços apertados e transportar cargas úteis muito mais pesadas do que ele próprio.
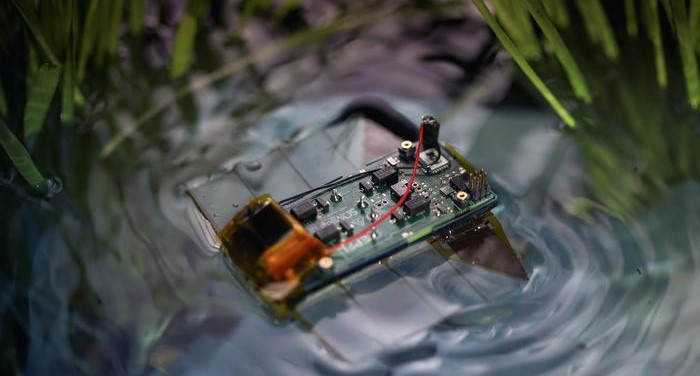
Mais pequeno do que um cartão de crédito e pesando 6 gramas, o ágil robô nadador é ideal para ambientes com espaço limitado, como os campos de arroz, ou para efetuar inspeções em máquinas aquáticas. A investigação foi publicada na revista Science Robotics.
“Em 2020, a nossa equipa demonstrou a existência de robôs rastejantes autónomos à escala dos insectos, mas criar robôs ultrafinos sem fios para ambientes aquáticos é um desafio totalmente novo”, afirma Herbert Shea, chefe do Laboratório de Transdutores Macios da EPFL. “Tivemos de começar do zero, desenvolvendo atuadores macios mais potentes, novas estratégias de locomoção ondulante e eletrónica compacta de alta tensão”, acrescenta.
Eletrónica em miniatura para funcionamento autónomo
Ao contrário dos sistemas tradicionais baseados em hélices, o robô da EPFL utiliza barbatanas silenciosamente ondulantes – inspiradas nos vermes marinhos – para propulsão. Esta conceção, combinada com o seu peso reduzido, permite que o robô flutue à superfície da água e se integre perfeitamente em ambientes naturais.
“A nossa conceção não se limita a reproduzir a natureza; vai além do que os organismos naturais conseguem alcançar”, explica Florian Hartmann, antigo investigador da EPFL, atualmente chefe de um grupo de investigação no Instituto Max Planck de Sistemas Inteligentes em Estugarda, Alemanha.
Ao oscilar as barbatanas até 10 vezes mais depressa do que os vermes marinhos, o robot consegue atingir velocidades impressionantes de 12 centímetros (2,6 comprimentos de corpo) por segundo. O robô também consegue uma capacidade de manobra sem precedentes, utilizando quatro músculos artificiais para acionar as barbatanas. Para além de nadar e virar para a frente, é capaz de nadar para trás e para os lados de forma controlada.
Para acionar o robô, os investigadores desenvolveram um sistema de controlo eletrónico compacto que fornece até 500 volts aos atuadores do robô com uma potência baixa de 500 miliwatts – quatro vezes inferior à de uma escova de dentes elétrica. Apesar da utilização de alta tensão, as baixas correntes e os circuitos blindados do robô tornam-no totalmente seguro para o seu ambiente. Os sensores de luz funcionam como simples olhos, permitindo ao robô detetar e seguir fontes de luz de forma autónoma.
Os investigadores prevêem que o robô contribua para estudos ecológicos, rastreio da poluição e agricultura de precisão, entre outros domínios. Os próximos passos envolvem a criação de uma plataforma mais robusta para testes no terreno.
“O nosso objetivo é prolongar os tempos de funcionamento e aumentar a autonomia”, afirma Hartmann. “Os conhecimentos fundamentais obtidos com este projeto não só farão avançar a ciência da robótica de inspiração biológica, como também lançarão as bases para sistemas robóticos práticos e realistas que se harmonizam com a natureza”, conclui.